Demonstratoren
Ein wichtiges Bindeglied zwischen der Forschung und der erfolgreichen Implementierung neuer Technologien in den Markt ist die Erprobung und Umsetzung ausgearbeiteter Lösungen unter anwendungsnahen Bedingungen. Hierzu werden sowohl Schiffe, als auch reale und digitale Testfelder als Plattformen zum Testen und Demonstrieren neuer, zukunftsorientierter Technologien benötigt. Sie ermöglichen eine schnellere und effizientere Entwicklung, erleichtern die Abstimmung zwischen verschiedenen Akteuren und steigern die Akzeptanz neuer Technologien.
Die nachfolgende Übersicht umfasst die wichtigsten aktuellen Demonstratoren und Testfelder für die Binnenschifffahrt in Deutschland. Sie erhebt keinen Anspruch auf Vollständigkeit, wird jedoch in unregelmäßigen Abständen aktualisiert.
-

OKKA
Digitales Testfeld Nord-Ostsee-Kanal - Fährstellen
Entwicklung und Erprobung von autonom agierenden Fährsystemen, die technisch sicher und zuverlässig sowie wirtschaftlich tragfähig zur direkten Querung von Binnenschifffahrtswegen einsetzbar sind.
Entwicklungszeitraum 07/2025–12/2027 Koordination F&E GmbH Themenfelder Automatisierung Partner Hochschule für Angewandte Wissenschaften Kiel, Anschütz GmbH, ADDIX GmbH Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept kombinierte betriebliche Nutzung & Forschungsbetrieb Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW 3) Förderkennzeichen 45DTW3V06A Status in der Entwicklung OKKA strebt die Demonstration eines hochautomatisierten Fährbetriebs auf dem stark frequentierten Nord-Ostsee-Kanal (NOK) unter realen Bedingungen an. Im Rahmen des Demonstrator- und Pilotbetriebs sollen sowohl der Versuchsträger als auch die Fährstelle temporär mit zusätzlichen technischen Systemen ausgestattet werden, um einen ersten (teil-)autonomen Betrieb zu ermöglichen. Die angestrebte Automatisierungsstufe umfasst dabei die eigenständige Kreuzung des Kanals einschließlich des Ab- und Anlegens. Alle Fahrbewegungen erfolgen unter Aufsicht der Crew, jedoch ohne deren planmäßigen Eingriff.
Ziel ist, die Realisierung von autonom agierenden Fährsystemen am NOK durch die praktische Erprobung derart vorbereiten zu können, dass sie technisch sicher und zuverlässig sowie wirtschaftlich tragfähig umsetzbar sind. In Zusammenarbeit mit den Behörden und unter Einbindung der Beteiligten wird dazu ein Fahrplan mit Handlungsempfehlungen erstellt.


-

Warnowstromer
Demonstrator des Vorhabens „WarnowstromerAI“
Die Personenfähre „Warnowstromer“ in Rostock nutzt und demonstriert das innovative Steuer- und Regelsystem zur Integration automatischer Assistenzfunktionen auf Binnenfähren, das im Rahmen des Vorhabens „WarnowstromerAI“ entwickelt wird.
Entwicklungszeitraum 12/2024–12/2027 Koordination Institut für Automatisierungstechnik, Fakultät für Informatik und Elektrotechnik der Universität Rostock Themenfelder Automatisierung Partner Rostocker Straßenbahn AG Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept Kombination aus Forschungsbetrieb & kommerzieller Nutzung Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW III) Förderkennzeichen 45DTW3V03A Status in der Entwicklung Das im Rahmen des Vorhabens „WarnowstromerAI“ zu entwickelnde innovative Steuer- und Regelsystem zur Integration automatischer Assistenzfunktionen auf Binnenfähren schafft einen universell einsetzbaren Ansatz, der wirtschaftliche, technische und zulassungsrechtliche Aspekte berücksichtigt.
Die Personenfähre „Warnowstromer“ der Rostocker Straßenbahn AG dient als Demonstrator des Vorhabens. Sie wird mit einer Schnittstelle zur automatischen Ansteuerung der Antriebe und bildgebender Sensorik ausgestattet. Geplante Manöver werden visualisiert, um Passagiere zu informieren und die Akzeptanz hochautomatisierter Systeme zu fördern. Gleichzeitig werden psychologische Effekte untersucht.
Die gesammelten Daten stehen weiteren Forschungsprojekten zur Verfügung und tragen zur langfristigen Weiterentwicklung autonomer Fährsysteme und zur Skalierbarkeit auf andere Schiffe und Wasserstraßen bei.

-

DigiTestElbe
Digitales Testfeld Elbe
Digitale Plattform zur Planung, Steuerung und Überwachung von Prozessen in der Binnenschifffahrt entlang der Elbe in Magdeburg und Hamburg.
Entwicklungszeitraum 12/2022–06/2025 Koordination Fraunhofer-Institut für Fabrikbetrieb und -automatisierung IFF (Magdeburg) Themenfelder Automatisierung Partner Fraunhofer-Center für maritime Logistik und Dienstleistungen CML (Hamburg), GALILEO Testfeld Sachsen-Anhalt der Otto-von-Guericke-Universität Magdeburg, Thorsis Technologies GmbH Demonstratortyp Digitales Testfeld Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW I) Förderkennzeichen 45DTWV09A, B, C Status in Betrieb Die Digitalisierung verändert intermodale Transportketten. Traditionelle Prozesse in der Binnenschifffahrt erleben durch neue Anforderungen an Echtzeit-Kommunikation, elektronische Dokumentation und Nachverfolgbarkeit einen Wandel. Der Bedarf an aktuellen Daten, modernen Bordsystemen und Infrastrukturen sowie echtzeitnahem Datenaustausch steigt, um Informationsflüsse und Abläufe zu optimieren und die Binnenschifffahrt effizient in moderne Logistikketten zu integrieren.
Vor diesem Hintergrund wurde im Rahmen des Digitalen Testfelds Elbe eine digitale Plattform zur Planung, Steuerung und Überwachung von Prozessen in der Binnenschifffahrt auf der Basis moderner Informations- und Kommunikationstechnologien, u.a. V2X-Standards von ETSI bzw. SAE International geschaffen. Die Plattform verknüpft eigene Daten mit externen Quellen (z.B. AIS, Pegelstände), bereitet sie auf und stellt sie diversen Anwendungen zur Verfügung – darunter eine KI-gestützte Analyse der Fahrrinnen und eine 3D Visualisierung der Elbe zur Verbesserung der Situationswahrnehmung und Entscheidungsunterstützung.
-

VERA
Digitales Testfeld: Virtuelle ERprobungen von Automatisierungsfunktionen (VERA)
Modular konfigurierbare virtuelle Test- und Erprobungsplattform zur frühzeitigen Erprobung von Automatisierungskomponenten und risikofreien Durchführung sicherheitskritischer Untersuchungen.
Entwicklungszeitraum 11/2022–06/2025 Koordination Entwicklungszentrum für Schiffstechnik und Transportsysteme e.V. (DST) Themenfelder Automatisierung Partner Rheinisch-Westfälisch Technische Hochschule Aachen (RWTH), Institut für Regelungstechnik (irt); Universität Duisburg-Essen (UDE) - Institut für Schiffstechnik, Meerestechnik und Transportsysteme (ISMT) - Lehrstuhl für Mechatronik (IMECH); Ingenieurbüro Kauppert GmbH Demonstratortyp Digitales Testfeld Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW II) Förderkennzeichen 45DTW2V06A Status in Betrieb VERA stellt eine modular konfigurierbare virtuelle Test- und Erprobungsplattform dar. Als digitales Testfeld erlaubt VERA nicht nur die frühzeitige Erprobung von Automatisierungskomponenten, sondern ermöglicht darüber hinaus auch eine risikofreie Durchführung sicherheitskritischer Untersuchungen vor allem von seltenen Ereignissen, die im Realbetrieb nur mit hohen Kosten und Risiken durchführbar sind. Virtuelle Erprobungen bieten darüber hinaus die Chance, mit vergleichsweise geringem Aufwand eine Vielzahl von Ereignissen in kurzer Zeit untersuchen zu können.
Während Entwicklungen und Demonstratoren in realen Testfeldern an einen gültigen Rechtsrahmen (Vorschriften und Regularien) gebunden sind, die für automatisierte Schiffe bzw. Systeme bis auf Weiteres noch gar nicht vorliegen, können die Entwicklungen und Erprobungen in einem virtuellen Testfeld auch ohne gültigen Rechtsrahmen direkt beginnen. Angesichts des hohen zeitlichen Entwicklungsdrucks ist dieser Vorteil von besonderer Bedeutung.


-

WAVELAB
Maritimer Versuchsträger für Personenfähren
Forschungsschiff „MS Wavelab“ zur Erprobung der vollautomatisierten bzw. autonomen Schifffahrt im Personenverkehr auf der Kieler Förde im Rahmen des Verbundvorhabens „CAPTN Förde Areal I und II“.
Entwicklungszeitraum 03/2021–12/2024 Koordination Forschungs- und Entwicklungs-Zentrum Fachhochschule Kiel GmbH Themenfelder Automatisierung, Antriebssysteme & Kraftstoffe Partner Christian-Albrechts-Universität zu Kiel; Anschütz GmbH; ADDIX GmbH; Wissenschaftszentrum Kiel GmbH Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW I [Bau]) und DTW II [Erprobung im Testfeld]) Förderkennzeichen 45DTWV007 Status in Betrieb In Kooperation mit regionalen Unternehmen und den Kieler Hochschulen wurde der Versuchsträger „MS Wavelab“ im Rahmen des Projekts „CAPTN Förde Areal I“ entwickelt und gebaut. Das Forschungsschiff bietet die Möglichkeit, die autonome Navigation und moderne Antriebssysteme zu erproben. Angetrieben wird die MS Wavelab mit einem rein elektrischen Antrieb, der seine Energie aus Akkus bezieht. Erprobt wird die autonome Schifffahrt im Rahmen von „CAPTN Förde Areal II“ auf dem gleichnamigen Testfeld.



-

Förde Areal
Digitales Testfeld für autonome Schifffahrt
Bereitstellung der notwendigen Infrastruktur für eine praxisnahe Erprobung des autonomen Schiffsverkehrs im Rahmen der Verbundvorhaben „CAPTN Förde Areal I und II“ u.a. mit dem Versuchsträger "MS WAVELAB".
Entwicklungszeitraum 03/2021–12/2024 Koordination Forschungs- und Entwicklungszentrum Fachhochschule Kiel GmbH Themenfelder Automatisierung Partner Christian-Albrechts-Universität zu Kiel; Raytheon Anschütz GmbH; ADDIX Internet Services GmbH; Wissenschaftszentrum Kiel GmbH Demonstratortyp Digitales Testfeld, offen, für Externe zugänglich Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW I und II) Förderkennzeichen 45DTWV007 Status in Betrieb Einrichtung eines digitalen Testfeldes und der landseitigen Infrastruktur einschließlich Kontrollzentrum zur Erprobung der (teil-)autonomen, emissionsfreien Fährschifffahrt auf der Kieler Förde, z.B. mit dem Versuchsträger WAVELAB oder im Rahmen externer Forschungs- und Entwicklungsvorhaben.

-

NOVA
Forschungsschiff für die Entwicklung hochautomatisierter und emissionsfreier Schiffssysteme
Versuchsträger zur Entwicklung und Erprobung des automatisierten Fahrens, emissionsfreier Antriebe und smarter Schiffssysteme unter realen Bedingungen.
Entwicklungszeitraum 12/2021–11/2024 Koordination Universität Duisburg-Essen, Institut für Nachhaltige und Autonome Maritime Systeme (INAM) Themenfelder Automatisierung, Antriebssysteme & Kraftstoffe, Innovative Schiffskonzepte Partner DST - Entwicklungszentrum für Schiffstechnik und Transportsysteme e.V., Universität Duisburg-Essen, Lehrstuhl für Mechatronik (IMECH) Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm Ministerium für Verkehr des Landes NRW Förderkennzeichen 03BIN0003 Status in Betrieb Aktuelle Herausforderungen wie Fachkräftemangel, Klimawandel und Energiewende erhöhen den Bedarf an innovativen technischen Lösungen. Insbesondere automatisiertes und perspektivisch autonomes Fahren sowie emissionsfreie Antriebssysteme gelten als Schlüsseltechnologien für die zukünftige Entwicklung der Binnenschifffahrt. Vor diesem Hintergrund wurde mit dem Forschungsschiff NOVA ein flexibler Versuchsträger zur Entwicklung und Erprobung automatisierter Fahrfunktionen, emissionsfreier Antriebe und intelligenter Schiffssysteme konzipiert und realisiert.
Mit dem Forschungsschiff NOVA sind insbesondere folgende Ziele verbunden:
die Entwicklung und Erprobung fortschrittlicher Automatisierungslösungen, die einen teilautomatisierten Schiffsbetrieb ermöglichen,
die Gestaltung intelligenter Assistenzsysteme, die den Schiffsbetrieb vereinfachen und effizienter machen, sowie
die Untersuchung und Weiterentwicklung emissionsfreier Antriebskonzepte für die Binnenschifffahrt.
Technisch ist die NOVA als modernes, vollelektrisch angetriebenes Schiff ausgelegt. Ein integriertes Energiemanagementsystem versorgt nicht nur den Antrieb, sondern auch Beleuchtung, Steuerung und weitere Bordsysteme vollständig elektrisch. Dadurch lassen sich Energieverbräuche, Lastverteilungen und unterschiedliche Betriebsstrategien detailliert analysieren. Aspekte wie Reichweite, Ladevorgänge und die Ausfallsicherheit der Energieversorgung spielen dabei eine zentrale Rolle.
Für die Erforschung automatisierter Fahrfunktionen ist die NOVA mit einer umfangreichen Sensorik sowie leistungsfähigen Kommunikations- und Steuerungssystemen ausgestattet. Während der Fahrt können Daten zur Navigation, zur Hinderniserkennung und zur optimalen Spurführung gesammelt werden. Neue Automatisierungs- und Assistenzsysteme lassen sich so unter praxisnahen Bedingungen testen und bewerten.
Als Forschungsschiff bietet die NOVA besondere Vorteile: Sie steht im Gegensatz zu kommerziell genutzten Schiffen durchgehend für wissenschaftliche Untersuchungen zur Verfügung und ermöglicht dadurch kurze Entwicklungszyklen. Ihr modularer Aufbau erlaubt es zudem, neue Technologien – etwa alternative Energiespeicher oder Antriebskonzepte – flexibel zu integrieren. Die NOVA bildet damit eine wichtige Brücke zwischen Laborversuchen und Simulationen auf der einen und dem realen Betrieb auf der anderen Seite und setzt neue Maßstäbe in Bezug auf eine nachhaltige Binnenschifffahrt.
Im Mai 2025 wurde das Schiff in einer feierlichen Zeremonie getauft und in Betrieb genommen.
https://www.buendnis-fuer-mobilitaet.nrw.de/blog/mobilistory-autonome-binnenschiffe-hightech-fuer-nrws-wasserstrassen.html



-

Boris Kluge
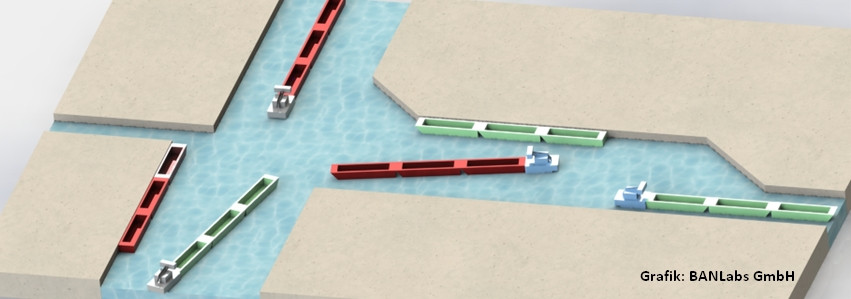
Versuchsträger des Vorhabens DigitalSOW
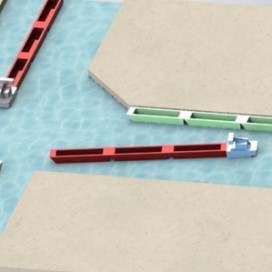
Demonstrationsplattform zur Erforschung und Erprobung emissionsfreier, intelligent vernetzter, automatisiert fahrender Schiffseinheiten mit dem Fokus „Citylogistik“. Der aus einem Bug- und Heckteil bestehende Versuchsträger verfügt über eine Ladefläche und kann mit den Versuchsträgern des Projektes „A-SWARM“ gekoppelt werden. Bug- und Heckteil sind jeweils mit einem Elektroantrieb ausgestattet und verfügen über leistungsfähige Sensorik.
Entwicklungszeitraum 06/2021–06/2024 Koordination Alberding GmbH Themenfelder Automatisierung, Antriebssysteme & Kraftstoffe, Innovative Schiffskonzepte, Transportlogistik & Umschlagskonzepte Partner Institut für Kommunikation & Navigation des Deutschen Zentrums für Luft- & Raumfahrt e.V., Schiffbau-Versuchsanstalt Potsdam GmbH (Entwurf & Konstruktion), Fachgebiet Entwurf & Betrieb Maritimer Systeme der TU Berlin (Eigner), Institut für Automatisierungstechnik der Universität Rostock sowie Verein für europäische Binnenschifffahrt & Wasserstraßen e.V. Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW) Förderkennzeichen 45DTWV002 Status in Betrieb Der Versuchsträger „Boris Kluge“ wurde im Rahmen des Projekts DigitalSOW entwickelt, gebaut und erfolgreich ersterprobt. Mit ihm wird eine Demonstrationsplattform für praktische Tests eines innovativen Binnenschiffstransports speziell für die Ver- und Entsorgung von Metropolregionen bereitgestellt. Der Fokus liegt auf der Erforschung und Erprobung emissionsfreier, intelligent vernetzter automatisiert fahrender Fahrzeuge. Der modular aufgebaute Versuchsträger besteht aus einem Bug- und Heckteil, die sowohl einzeln als auch im Verbund agieren können. Sie lassen sich zu größeren Einheiten koppeln und wieder entkoppeln und sind mit modernster Sensorik ausgestattet.
Das Schiff verfügt über einen emissionsfreien Elektroantrieb, eine multifunktionell nutzbare Ladefläche und über eine leistungsfähige Sensorik für die Technologieentwicklungen zum automatisierten Fahren (GNSS, LiDAR, optische Kameras, elektromagnetischer Koppelmechanismus).
Weiterbetrieb im Rahmen von Anschlussvorhaben.



-

DigitalSOW
Digitales Testfeld Spree-Oder-Wasserstraße
Errichtung und Betrieb eines digitalen Testfeldes zur Untersuchung, Entwicklung und Erprobung von Konzepten, Algorithmen und Technologien für das automatisierte und vernetzte Fahren auf der Spree-Oder-Wasserstraße (SOW) mit Fokus Ver- und Entsorgung der Metropolregion Berlin über die Wasserstraße.
Entwicklungszeitraum 06/2021–06/2024 Koordination Alberding GmbH Themenfelder Automatisierung, Antriebssysteme & Kraftstoffe, Transportlogistik & Umschlagskonzepte Partner Deutsches Zentrum für Luft- & Raumfahrt e.V., Institut für Kommunikation & Navigation; Schiffbau-Versuchsanstalt Potsdam GmbH; TU Berlin, Fachgebiet Entwurf & Betrieb Maritimer Systeme; Universität Rostock, Institut für Automatisierungstechnik; Verein für europäische Binnenschifffahrt & Wasserstraßen e.V Demonstratortyp Reales & digitales Testfeld, projektbezogen Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW I) Förderkennzeichen 45DTWV002 Status in Betrieb Untersuchung und praktische Erprobung der Möglichkeiten der Ver- und Entsorgung von Metropolregionen über die Wasserstraße am Beispiel von Berlin. Betrachtung neuer Transport- und Logistikkonzepte, hoch automatisiert fahrender Transportträger mit ökologischen Antrieben, kleinen Containerboxen und neuen Umschlagformen.
Entwicklung einer neuen Versuchsträgerplattform für die praktische Erprobung des automatisierten und vernetzten Fahrens für Aufgaben der Citylogistik; Ausstattung mit elektrischer Antriebstechnik und moderner Sensorik. Aufbau und Betrieb eines digitalen Testfelds an der Spree-Oder-Wasserstraße.
Weiterentwicklung im Rahmen des Folgevorhabens Digital SOW 2.


-

ELLA
Entwicklungsplattform im Modellmaßstab für Manöver-Automatisierung
ELLA ist ein Kleinfahrzeug im Maßstab 1:6 und dient als Entwicklungsplattform für das automatisierte Manövrieren. Der Versuchsträger fungiert als Lernumgebung für maschinelles Lernen von Manövern und zur Erprobung verschiedener Propulsionskonfigurationen.
Entwicklungszeitraum 06/2021–06/2024 Koordination Entwicklungszentrum für Schiffstechnik und Transportsysteme e.V. (DST) Themenfelder Automatisierung, Antriebssysteme & Kraftstoffe Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW I) Förderkennzeichen 45DTWE002A Status in Betrieb ELLA ist eine Entwicklungsplattform, die gezielt für das automatisierte Manövrieren entwickelt und gebaut wurde. Sie dient als Lernumgebung für eine künstliche Intelligenz, die anhand manuell vorgefahrener Manöver und eigener Fahrversuche im realen Testfeld Schritt für Schritt lernt, die geforderten Manöver zu planen und auszuführen.
Die Erfahrungen und Ergebnisse lassen sich unter Berücksichtigung der Ähnlichkeitsgesetze auf reale Binnenschiffe übertragen: Durch die maßstabsgerechte Abbildung der Rumpfform sowie der Antriebs- und Manövrierorgane wird das Fahrverhalten eines typischen Gütermotorschiffes realitätsgetreu abgebildet.
Weiterbetrieb und -entwicklung im Rahmen von Anschlussvorhaben.


-

Ernst Kramer
Demonstrator des Vorhabens FernBin
Das Schiff „Ernst Kramer“ wurde im Rahmen des Verbundvorhabens „Ferngesteuertes, koordiniertes Fahren in der Binnenschifffahrt – FernBin“ zu einem Forschungsschiff und Demonstrator weiterentwickelt und eingesetzt.
Entwicklungszeitraum 07/2020–03/2024 Koordination Rhenus Schiffsmanagment GmbH; DST e.V. Themenfelder Automatisierung Partner Argonics GmbH; Bundesanstalt für Wasserbau (BAW); Ingenieurbüro Kaupert; IN - innovative navigation GmbH; RWTH - irt; UDE - ISMT/IMECH/SRS Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept Kombinierte gewerbliche Nutzung und Forschungsbetrieb Förderprogramm BMWE / Maritimes Forschungsprogramm Förderkennzeichen 03SX506 Status in Betrieb Im Rahmen des Vorhabens „FernBin“ wurde das Schiff „Ernst Kramer“ mit der nötigen technischen Ausrüstung zur Fernsteuerung ausgestattet. Diese umfasst die erforderlichen Sensoren und Aktoren mit den zugehörigen Schnittstellen, den Fernsteuerstand an Land sowie das Datenprotokoll zur Gewährleistung einer robusten und sicheren Datenübertragung.
Assistenzsysteme, wie z.B. ein adaptives Navigationssystem, das dynamisch auf den umgebenden Verkehr reagiert und Verkehrsinformationen in Echtzeit verarbeitet, den Raumbedarf für die Begegnung von Schiffen prognostiziert, visualisiert und mögliche Handlungsoptionen anzeigt, unterstützen und entlasten den fernsteuernden Schiffsführer. Damit kann dieser das eigene Schiff in Abhängigkeit des Verhaltens anderer Verkehrsteilnehmer von einem Fernsteuerstand aus sicher und zuverlässig navigieren.
Weiterbetrieb im Rahmen von Anschlussvorhaben.


-
SPS
Smart Port Shuttle Hildesheim
Testfeld am Stichkanal Hildesheim für die Erprobung von Komponenten eines (teil-)automatisierten Shuttle-Betriebs.
Entwicklungszeitraum 06/2021–06/2023 Koordination BANLabs GmbH Themenfelder Automatisierung, Antriebssysteme & Kraftstoffe, Transportlogistik & Umschlagskonzepte Partner Deutsche Binnenreederei AG; Fraunhofer IIS; Hafenbetriebsgesellschaft mbH Hildesheim; Maritime A-Services GmbH Demonstratortyp Reales Testfeld, offen (auch für Externe zugänglich) Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW I) Förderkennzeichen 45DTWV009C Einrichtung eines automatisierten Shuttledienstes mit Schubleichtern mit drei Schwerpunkten:
Automatisierung des Binnenschiffstransportes,
Angepasstes Schiffskonzept unter Berücksichtigung eines Elektroantriebs zur Ermöglichung energieeffizienter und lokal emissionsfreier Transporte sowie
Logistikkonzept für den Shuttlebetrieb.
Erprobung und Demonstration des Shuttles auf dem Testfeld mit Hilfe geeigneter Sensorik und satellitenbasierter Empfängertechnologien zur Positionsbestimmung an Bord eines Schiffs der Deutschen Binnenreederei.

-
Niedersachsen 22
Demonstrator des Vorhabens AutoBin
Das Schiff „Niedersachsen 22“ wurde als Forschungsschiff und Demonstrator im Rahmen des Verbundvorhabens „Autonomes Binnenschiff – Simulation und Demonstration von automatisiertem Fahren in der Binnenschifffahrt“ eingesetzt.
Entwicklungszeitraum 10/2019–03/2023 Koordination HGK Shipping GmbH | DST e.V. Themenfelder Automatisierung Partner UDE - IMECH/SRS Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept Kombinierte gewerbliche Nutzung und Forschungsbetrieb Förderprogramm Leitmarktwettbewerb MobilitätLogistik.NRW Förderkennzeichen EFRE-0801713 Status in Betrieb Das Schiff „Niedersachsen 22“ des assoziierten Partners HGK Shipping GmbH wurde als Testschiff und Demonstrator im Rahmen des Verbundvorhabens „AutoBin“ mit der für das automatisierte Fahren erforderlichen Sensorik und Aktorik ausgerüstet und erprobt. Darüber hinaus wurde eine automatische Steuerung in einem Simulator entwickelt, die in der Lage ist, das Binnenschiff sicher von einem Startpunkt zu einem Zielpunkt zu steuern. Die Realerprobung und Demonstration der Steuerung mit dem ausgerüsteten Binnenschiff erfolgte im Testfeld Dortmund-Ems-Kanal.
Weiterbetrieb im Rahmen von Anschlussvorhaben.



-
HANNAH
Digitales Testfeld Schlei
Erschließung der Schlei als Testfeld für die Forschung und Entwicklung von teilautonomen bis hin zu vollautonomen Systemen (Automatisierungslevel 2 bis 5).
Entwicklungszeitraum 08/2021–12/2022 Koordination Unleash Future Boats GmbH Themenfelder Automatisierung Demonstratortyp Reales bzw. digitales Testfeld, projektbezogen; fallweise auch für Externe zugänglich Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMV / Förderrichtlinie digitale Testfelder an Bundeswasserstraßen (DTW I) sowie weitere Förderprogramme zur Folgenutzung Förderkennzeichen 45DTWV004A Im Projekt HANNAH wurde die Schlei als Testfeld für die Forschung und Entwicklung von teilautonomen bis hin zu vollautonomen Systemen erschlossen. Der Fokus lag in der Ausweisung und Aktivierung des 42 km langen Testfeldes für Schiffe und deren Systeme für Automatisierungslevel 2 bis 5. Das Testfeld ermöglicht die Realisierung unterschiedlicher Szenarien und bietet gut beherrschbare und kontrollierbare Bedingungen.
Durchführung koordinierter Feldtests mit dem Technikträger ZeroOne; dieser wurde außerhalb des Fördervorhabens entwickelt und verfügt über eigene Sensorik, Sensorfusion und Aktorik sowie Umfeldwahrnehmung und autonome Fähigkeiten.
Der Aufbau von zusätzlicher Infrastruktur ist möglich und im Rahmen der Folgenutzung vorgesehen. Dabei geht es u.a. um die Entwicklung eines eigenen Hafens und die Vernetzung digitaler, autonomer und emissionsfreier Systeme mit Hafenaktivitäten und Logistiklösungen.
-
AKOON
Automatisierte und koordinierte Navigation von Binnenfähren
Entwicklung eines Systems für den vollautomatisierten bzw. teilautonomen Fährbetrieb einer Binnenfähre. Hierzu gehört neben der sicheren und energieeffizienten Überfahrt auch das An- und Ablegen an den Fähranlegern.
Entwicklungszeitraum 07/2019–12/2022 Koordination J.M. Voith SE & Co. KG | VTA Themenfelder Automatisierung, Antriebssysteme & Kraftstoffe Partner RWTH Aachen - Institut für Regelungstechnik (IRT); Rheinfähre Maul GmbH; Argonav GmbH Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept Kombinierte gewerbliche Nutzung und Forschungsbetrieb Förderprogramm BMWE / Maritimes Forschungsprogramm Förderkennzeichen 03SX479A Status in Betrieb Im Rahmen des Vorhabens AKOON wurde die Fähre "Horst" des Unternehmens Rheinfähre Maul GmbH für den voll-automatisierten bzw. teil-autonomen Fährbetrieb um- bzw. ausgerüstet.
Aufgrund von Sandbänken, starker Strömung, einer engen Passage und eines hohen Verkehrsaufkommens auf dem Rhein gilt das Fährgebiet als besonders anspruchsvoll, insbesondere bei niedrigen Pegelständen oder Nebel. Der automatisierte Betrieb entlastet das Fährpersonal v.a. in kritischen Situationen und ermöglicht eine sichere Überfahrt. Durch eine intelligente Streckenführung und optimierte Ansteuerung der vier Voith-Schneider-Propeller wurden der Treibstoffverbrauch reduziert und die Sicherheit erhöht. Dabei benötigt die Streckenplanung umfassende Informationen über die Verkehrssituation auf dem Rhein, die durch Kombination verschiedener Nah- und Fernbereichssensoren zuverlässig bereitgestellt und prädiziert werden.
Innerhalb des Vorhabens wurde zudem das gesamte Fährgebiet in einen Simulator implementiert und ein digitaler Zwilling der Fähre "Horst" geschaffen, an dem das AKOON-System entwickelt und intensiv erprobt wurde, bevor erste Versuche auf dem realen Schiff stattfanden.
Weiterbetrieb des Demonstrators im operativen Einsatz
-
A-SWARM
Autonome elektrische Schifffahrt auf Wasserstraßen in Metropolregionen
Erforschung und Entwicklung von Technologien, die einen autonomen Betrieb von elektrisch angetriebenen Wasserfahrzeugen auf Binnenwasserstraßen in Metropolregionen ermöglichen. Die Anforderungen betreffen neben der Logistik sowohl die Echtzeit-Trajektorienplanung auf Flüssen, Kanälen und Schleusen als auch das möglichst präzise Abfahren von Trajektorien unter Berücksichtigung von Strömungen, Untiefen, Wind und Begegnungsverkehr.
Entwicklungszeitraum 09/2019–08/2022 Koordination Schiffbau-Versuchsanstalt Potsdam GmbH Themenfelder Automatisierung, Innovative Schiffskonzepte, Transportlogistik & Umschlagskonzepte Partner BEHALA - Berliner Hafen- und Lagerhausgesellschaft mbH; Infineon Technologies AG; Veinland GmbH; Technische Universität Berlin; Universität Rostock Demonstratortyp Projektbezogener Demonstrator Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm BMWE / Maritimes Forschungsprogramm Förderkennzeichen 03SX485 Status in Betrieb A-SWARM betrachtet sowohl die technologischen Anforderungen an das Wasserfahrzeug selbst, als auch die Frage, ob und welche technologischen Anforderungen an die Infrastruktur hinsichtlich Kommunikation und Positionierung bestehen. Dies betrifft insbesondere die Frage, ob es möglich ist, das Fahrzeug selbst mit ausreichender Sensorik zu bestücken, so dass es, abgesehen von einer Satellitenpositionierung, ohne weitere landgestützte Hilfsmittel sicher navigieren kann oder ob es notwendig ist, für einen sicheren autonomen Betrieb zusätzliche Infrastruktur an der Wasserstraße zu installieren.
Im Weiteren geht es um die Frage, ob die Ausstattung des Fahrzeuges mit State-of-the Art-Sensoren eine hinreichend genaue Beschreibung des Umfeldes ermöglicht oder ob es zwingend notwendig ist, externe Informationen z.B. über andere Verkehrsteilnehmer im Sinne einer Verkehrslenkung durch eine Leitwarte an das Fahrzeug zu spielen, um eigene Entscheidungen durch ein KI-System an Bord treffen zu können.
Ein weiterer Aspekt ist die Optimierung der Technologie hinsichtlich der Zielgrößen der möglichst genauen Positionierung und des möglichst geringen Einsatzes von infrastrukturellen Mitteln, um perspektivisch weder Verkehrssicherheit noch Marktfähigkeit zu gefährden.
Nachweis der technischen Machbarkeit durch einen Demonstrator in Form von zwei Versuchsträgern, die die Zusammenführung der genutzten Technologien erproben.
Weiterentwicklung im Rahmen des Folgevorhabens "A-SWARM II" und in Verbindung mit dem Versuchsträger "Boris Kluge" des Vorhabens und Testfelds "DigitalSOW"

-
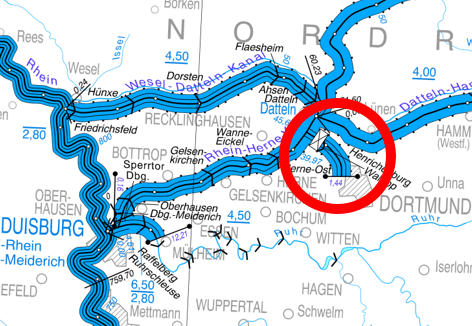
Rhein-Ruhr-Testfeld
Reales Testfeld auf dem südlichen Dortmund-Ems-Kanal
Das Rhein-Ruhr-Testfeld ist ein reales Testfeld auf einem 15 km langen Abschnitt des Dortmund-Ems-Kanals.
Themenfelder Automatisierung Demonstratortyp Reales Testfeld, offen (auch für Externe zugänglich) Nutzungskonzept Kombinierte gewerbliche Nutzung & Forschungsbetrieb Status in Betrieb Das Testfeld umfasst das südliche Ende des Dortmund-Ems-Kanals zwischen der Schleuse Waltrop im Norden und dem Hafen Dortmund im Süden mit insgesamt 15 Brücken. Durch den nahezu konstanten Wasserstand ohne komplexe Strömungsverhältnisse, die regelmäßige und genau definierte Bodentopographie und die nur mäßige Verkehrsdichte ergeben sich ideale Verhältnisse für einen Testbetrieb. Mit diesen Randbedingungen lassen sich Szenarien verschiedener Komplexität erproben.
-
eMIR
e-Maritime Integrated Reference Platform
Generisches Testfeld zur Erforschung innovativer Vorgehensweisen, Methoden und Werkzeuge im Rahmen der Entwicklung, Verifikation und Validierung neuer maritimer Systeme.
Koordination DLR – Institut Systems Engineering für zukünftige Mobilität Themenfelder Automatisierung Demonstratortyp Reales Testfeld - offen (auch für Externe zugänglich) Nutzungskonzept Reiner Forschungsbetrieb (keine gewerbliche Nutzung) Förderprogramm gefördert durch MWK Niedersachsen und BMWE Status in Betrieb eMIR bietet als maritimes Testfeld kleinen und mittleren Unternehmen sowie Forschungsinstituten die Möglichkeit, hochautomatisierte maritime Assistenzsysteme und Konzepte für autonome Schiffe zu erforschen und zu entwickeln. Diese können unter virtuellen wie realen Bedingungen getestet werden. eMIR bietet bei der Erforschung und Entwicklung solcher Systeme und Technologien drei wesentliche Einsatzmöglichkeiten:
Datensammlung und -analyse,
Durchführung von Simulationen und physischen Experimenten sowie
Erprobung und Demonstration.
eMIR soll in Kooperation u. a. mit den DLR-Instituten Kommunikation und Navigation und Schutz maritimer Infrastrukturen für die Themen Sensordatenintegration, Plattformen, Datenaustausch und Erprobungsgebiete auf See weiter ausgebaut werden. Es soll darüber hinaus als Großforschungsinfrastruktur mit Diensten zur Hafensensorik, Kommunikationstechnik, hochgenauen Karten etc. ergänzt werden.